


C12.1 Rotational Dynamics
Rigid body
Rigid bodies are those solid bodies in which molecules are tightly packed and small inter-molecular distance with definite shape. The inter-molecular distance between two particles remain unchanged due to external forces i.e even on application of force, their configuration do not change during linear and rotational motion.
Rotational motion is the type of motion in which a body moves about any given axis. During rotational motion, the angular velocity of all the particles of a body are same whereas their linear velocity is different. However no real body is perfectly rigid practically. But for all practical purposes, all solids can be regarded as rigid bodies. A rigid body can undergo both transnational and rotational motion.
A rigid body is said to have translatory motion if it moves bodily from one place to another. Every particle in it suffers the same displacement. Similarly, a rigid body is said to be in rotational motion about a fixed axis when its particles generate concentric circles withe the same angular velocity but different linear velocity. For example , Rotation of fan, rotation of the earth, spinning top, etc.
Equations of angular motion
The rotation motion of a rigid body about an axis is described by an angular displacement \(\theta\). Every particles has its own linear displacement that is represented by s, the relation between angular and linear displacement is
\[s = r \theta........(i)\]
 |
| a b |
\[\omega = \frac {d\theta}{dt}..........(ii)\]
As the angular velocity is not uniform, the angular acceleration \(\alpha\) is given by,
\[\alpha = \frac {d\omega}{dt}............(iii)\]
The liner velocity v of the the particle of the rigid body is tangent along the curved path. The relation between linear and angular velocity is given by,
Using equation (i) and (ii), we get,
\[\omega = \frac {d\theta}{dt}\]
Putting the value of \(\theta \) from equation (i)
\[or,\omega = \frac {d ({\frac{s}{r}})}{dt}\]
\[or, \omega = \frac {1}{r} \frac{ds}{dt}\]
\[or, \omega = \frac {1}{r} v\]
\[\therefore v =r\omega............(iv)\]
Again,
From equation (iii) and (iv)
\[\alpha = \frac {d\omega}{dt}\]
\[or, \alpha = \frac {d (\frac {v}{r})}{dt}\]
\[or, \alpha = \frac {1}{r} \frac{dv}{dt}\]
\[or, \alpha = \frac {1}{r} a\]
\[\therefore a = r\alpha\]
First Equation
Consider a rigid body rotating about a fixed axis with angular acceleration '\(\alpha \)' and 'd\(\omega\)' be the change in angular velocity in time 'dt'. By the definition of angular acceleration of a rigid body,
\[\alpha = \frac{{d\omega }}{{dt}}\]
\[\alpha .dt = d\omega \]
Integrating both sides, we get
\[\alpha \int {dt} = \int {d\omega } \]
\[\alpha . t + c = \omega............(i)\]
At time t = 0, \[\omega = {\omega _0}\]
Using in equation (i)
\[\alpha . 0 + c = {\omega_0}\]
\[{\omega _0} = c\]
Using this value in equation (i)
\[\omega ={\omega_0} +{\alpha}t................(ii)\]
Second equation:
Let \(\omega\) be the angular velocity of a rigid body at any instant of time t, then by the defination of angular velocity,
\[\omega =\frac{{d\theta }}{{dt}}\]
or, \[d\theta = \omega dt..............(iii)\]
At t = 0, \(\theta\) = 0
At t = t, let \(\theta\) = \(\theta\)
Integrating equation (iii) in the limit of time and angular displacement, we get,
\[\int\limits_0^\theta {d\theta = \int\limits_0^t {\omega dt} } \]
\[or,\int\limits_0^\theta {d\theta = \int\limits_0^t{\omega_0 + \alpha t dt}}\]
\[or,\int \limits_0^\theta d\theta =\int\limits_0^t dt +\alpha \int\limits_0^t tdt \]
\[\left[ \theta \right]_0^\theta = {\omega _0}\left[ t \right]_0^t + \alpha \left[ {\frac{{{t^2}}}{2}} \right]_0^t\]
\[\left[ {\theta - 0} \right] = {\omega _0}\left[ {t - 0} \right] + \frac{\alpha }{2}\left( {{t^2} - 0} \right)\]
\[\theta = {\omega _0}t + \frac{1}{2}\alpha {t^2}............(iv)\]
Third equation of motion:
Angular acceleration \(\alpha\) may be expressed as :
\[\alpha = \frac{{d\omega }}{{dt}} = \frac{{d\omega }}{{d\theta }}.\frac{{d\theta }}{{dt}} = \frac{{d\omega }}{{d\theta }}\omega \]
\[\omega d\omega = \alpha d\theta .................(v)\]
At t=0, \(\theta\) = 0 and \(\omega\)=\(\omega_0\) (initial angular velocity)
At t = t, \(\theta\) = \(\theta\) and \(\omega\)=\(\omega\) (final angular velocity)
Integrating equation (v) within the limits of \(\theta\) and \(\omega\), we get
\[\int\limits_{{\omega _0}}^\omega {\omega d\omega } = \int\limits_0^\theta {\alpha d\theta = \alpha \int\limits_0^\theta {d\theta } } \]
\[\left[ {\frac{{{\omega ^2}}}{2}} \right]_{{\omega _0}}^\omega = \alpha \left[ \theta \right]_0^\theta \]
\[\frac{{{\omega ^2}}}{2} - \frac{{\omega _0^2}}{2} = \alpha (\theta - 0)\]
\[{\omega ^2} - \omega _0^2 = 2\alpha \theta \]
Moment of inertia:
From the Newton's law of motion, inertia is the property of an object by virtue of which the object is unable to change its state of rest of uniform linear motion. So, the greater the mass of the object, the greater the force required to produce the linear acceleration in the object i.e inertia is directly proportional to the mass of the object.
Similarly, in case of rotational motion of an object about an axis is unable to change its rotational motion. This inability of the rotating body is called rotational inertia or moment of inertia. Therefore moment of inertia is analogous to the mass in linear or transnational motion.
Moment of inertia is the rotational inertia of a rotating body about a fixed axis that opposes any change in the state. Moment of inertia is not constant, but its value varies with the axis of rotation chosen and the distribution of mass of the body. Mathematically it the product of mass of a body (m) and square of the distance of the mass from the axis of rotation (r). So,
Moment of inertia of a rotating body about a fixed axis (I) =mr2 . Its SI unit is Kgm2 . Its dimensional formula is [ML2T0].

Consider a body having 'n' particles of masses m1,m2, m3, ...............mn, which are at distance r1, r2, r3.................rn from the axies of rotation YY' as shown in the figure. Now, moment of inertia of particle of mass m1 is,
I1=m1r12
I2 = m2r22
Similarly,
In = mnrn2
Now, Total moment of inertis is,
I = I1 + I2 + I3.............In
I = m1r12 + m2r22 + ................ + mnrn2
\[I = \sum\limits_{i = 1}^n {{m_i}} r_i^2\]
[Moment of inertia plays the same role in rotational dynamics like mass does in transnational motion.]
Kinetic Energy of rotating body:
Let us suppose a rigid body of mass M is rotating about an axis YY'. The angular velocity of the body about the axis is \(\omega\). If \({m_1} {y_1}^2\). If \(m_1\) , \(m_2\) , \(m_3\) ............\(m_n\) are the masses of particles of the rigid body at distance \(r_1\) , \(r_2\) ,\(r_3\) ................\(r_n\) respectively from the axis YY'. Here, each particles has same angular velocity but different linear velocity, since each particles are different distance from the rotational axis.
Let the linear velocities of masses \(m_1\) , \(m_2\) , \(m_3\) ............\(m_n\) be \(v_1\) , \(v_2\) ,\(v_3\) ................\(v_n\) respectively. Then,
\(v_1 =\omega r_1\), \(v_2 =\omega r_2\), \(v_3 =\omega r_3\),.................., \(v_n =\omega r_n\)
When a body rotates about the axis, it possesses rotational K.E.
Rotational kinetic energy of mass \(m_1\) = \(\frac {1}{2} m_1 (v_1)^2 \) = \(\frac {1}{2} m_1 (\omega r_1)^2 \) = \(\frac {1}{2} m_1 {\omega}^2 {r_1}^2 \)
Rotational kinetic energy of mass \(m_2\) = \(\frac {1}{2} m_2 (v_2)^2 \) = \(\frac {1}{2} m_2 (\omega r_2)^2 \) = \(\frac {1}{2} m_2 {\omega}^2 {r_2}^2 \)
:
:
:
Rotational kinetic energy of mass \(m_n\) = \(\frac {1}{2} m_n (v_n)^2 \) = \(\frac {1}{2} m_n (\omega r_n)^2 \) = \(\frac {1}{2} m_n {\omega}^2 {r_n}^2 \)
Total rotational kinetic energy of the rigid body is equal to the sum of the kinetic energy of all the particles of the rotating body,
Rotational KE of the body = \(\frac {1}{2} m_1 {\omega}^2 {r_1}^2 \) + \(\frac {1}{2} m_2 {\omega}^2 {r_2}^2 \) + \(\frac {1}{2} m_3 {\omega}^2 {r_3}^2 \) +........
or, KE = \(\frac {1}{2} (m_1 {r_1}^2 + m_2 {r_2}^2 + m_3 {r_3}^2 + ............){\omega}^2\)
or, KE= \(\frac {1}{2} \sum\limits_{i=1}^n {(m_i {r_i}^2)} {\omega}^2\)
\(\therefore \) KE= \(\frac {1}{2} I {\omega}^2\)
Where, \(I = \sum\limits_{i = 1}^n {{m_i}} r_i^2\) moment of inertia of the rigid body about YY' axis.
Above equation is analogous to the transnational kinetic energy (\(\frac {1}{2}{m}{v}^2\) ) of the body.
Radius of Gyration (K):
Radius of gyration is defined as the perpendicular distance between the axis of rotation and the point where all the mass of the body is supposed to be concentrated (centre of mass).
Consider a body of 'n' particles having masses m1 m2........... mn at distances r1, r2, .......rn from axis of rotation. Let M be the total mass of the body and K be the Radius of gyration.

Now Moment of Inertia
\[I = M{K^2}.........(i)\]
Also,
\[I = {m_1}r_1^2 + {m_2}r_2^2 + ......... + {m_n}r_n^2........(ii)\]
From equation (i) and (ii)
\[M{K^2} = {m_1}r_1^2 + {m_2}r_2^2 + ......... + {m_n}r_n^2\]
Let,
\[m = {m_1} = {m_2} + ......... + {m_n}\]
Also,
M = nm
Now,
\[mn{K^2} = m({r_1^2} + {r_2^2} + {r_3^2} + ......... + {r_n^2})\]
\[{K^2} = \frac{{(r_1^2 + r_2^2 + r_3^2 + ......... + r_n^2)}}{n}\]
\[{K^2} = \sqrt {\frac{{(r_1^2 + r_2^2 + r_3^2 + ......... + r_n^2)}}{n}} \]
1. Moment of inertia of thin uniform rod:
a. About an axis through its centre of mass and perpendicular to it:

Consider a rod & mass 'm' and length 'l'. Let dx be a small length at a distance 'x' from the axis of rotation passing through the centre of mass as show in the figure above.
Now,
Mars per unit = M /l
The mass of length dx is (dm)= dx (M/l) then, the moment of inertia of this mass is given by;
dI = dmx²
Total moment of inertia of the rod is,
\[I = 2\int\limits_0^{{\textstyle{l \over 2}}} {dm.{x^2}} \]
\[ = 2\int\limits_0^{{\textstyle{l \over 2}}} {{x^2}\frac{M}{l}dx} \]
\[ = 2\frac{M}{l}\int\limits_0^{{\textstyle{l \over 2}}} {{x^2}dx} \]
\[ = 2\frac{M}{l}\left[ {\frac{{{x^3}}}{3}} \right]_0^{{\textstyle{l \over 2}}}\]
\[ = \frac{2}{3}\frac{M}{l}\left[ {{{\left( {{\textstyle{l \over 2}}} \right)}^3} - {{\left( 0 \right)}^3}} \right]\]
\[ = \frac{2}{3}\frac{M}{l}\frac{{{l^3}}}{8}\]
\[ = \frac{1}{{12}}\frac{M}{l}{l^3}\]
\[\therefore I = \frac{1}{{12}}{M}{l^2}\]
b. About an axis through one end:
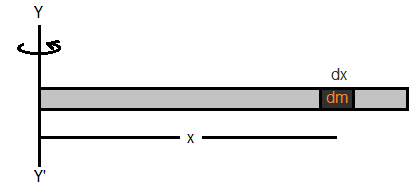
Consider a thin uniform rod of mass 'm' and length 'l'. Let y y' be an axis through one end. Let 'dx' be a small length at a distance 'x' from the axis of rotation as shown in the figure above. Now,
Mass per unit length = \(\frac{M}{l}\)
and Mass of length dx is \[dm =dx.\frac{M}{l}\]
Now, The moment of inertia of mass dm is given by,
\[dI = dm{x^2}\]
Then, Total moment of inertia of the body is given by,
\[I = \int\limits_0^l {dm{x^2}} \]
\[ = \int\limits_0^l {\frac{M}{l}{x^2}} dx\]
\[ = \frac{M}{l}\int\limits_0^l {{x^2}} dx\]
\[ = \frac{M}{l}\left[ {\frac{{{x^3}}}{3}} \right]_o^l\]
\[ = \frac{M}{{3l}}{l^3}\]
\[ = \frac{1}{3}M{l^2}\]
\[\therefore I = \frac{1}{{3}}{M}{l^2}\]
2. Moment of inertia of a ring:
a. About an axis perpendicular and passing through centre:

Let us consider a circular ring of radius 'r' and mass 'M'. YY' is the axis perpendicular to its plane passing through the centre of the ring. and dx be the small length at point 'r' from axis of rotation.
Then mass per unit length of the ring is given by,
Mass per unit length =\(\frac{M}{2\pi r}\)
Then, mass of the small length is,
\[dm = \frac{M}{2\pi r} dx\]
Moment of inertia of elementary portion is,
\[dI = dm.r^2\]
\[= \frac {M}{2 \pi r} . dx.r^2\]
\[= \frac{Mr}{2\pi}. dx ............(i)\]
The total moment of inertia of circular ring, axis passing through the centre and perpendicular to its plane is calculated by integrating equation (i) from 0 to 2\(\pi\)r.
\[I = \int\limits_0^{2\pi r} {dI} \]
\[I = \int\limits_0^{2\pi r} \frac{Mr}{2\pi}dx \]
\[I = \frac {M}{2\pi} \int\limits_0^{2\pi r} r dx\]
\[I=\frac {Mr}{2\pi} \int\limits_0^{2\pi r} dx\]
\[I = \frac{{Mr}}{{2\pi }}\left[ x \right]_0^{2\pi r}\]
\[I= \frac{{Mr}}{{2\pi}}\left[2\pi r - 0 \right]\]
\[\therefore I=Mr^2\]
Which is the expression for the moment of inertia of circular ring about an axis perpendicular to the plane passing through centre.
3. Moment of inertia of a circular disc about an axis passing through centre and perpendicular to the plane of the disc:


Let \(I_{x}\), \(I_{y}\) and \(I_{z}\) be the moment of inertia of the plane lamina about three mutually perpendicular axes passing through the point O. XO and YO are in the plane and ZO is perpendicular axis to the plane of lamina. Then,
\[I_{Z} = I_{x} +I_{y}\]

Suppose, OX and OY be the mutually perpendicular axes in the plane of lamina. \(m_1\) is the mass of a particle at a distance \(r_1\) from the intersection point O. The particle is \(x_1\) and \(y_1\) distance from X-axis and Y-axis respectively. Moment of inertia of the \(m_1\) about Y-axis is \({m_1} {y_1}^2\). If \(m_1\) , \(m_2\) , \(m_3\) ............\(m_n\) are the masses of particles at distance \(r_1\) , \(r_2\) ,\(r_3\) ................\(r_n\) respectively from point O. These masses are are at a distance of \(x_1\) , \(x_2\) ,\(x_3\) ................\(x_n\) from Y-axis and \(y_1\) , \(y_2\) ,\(y_3\) ................\(y_n\) from X-axis respectively. Then,
Moment of inertia of the lamina about X-axis \({I_x} = {m_1}{y_1}^2 + {m_2}{y_2}^2 +{m_3}{y_3}^2 + ...............+{m_n}{y_n}^2\) = \(\sum m{y}^2\)
Similarly, Moment of inertia of the lamina about Y-axis \({I_y} = {m_1}{x_1}^2 + {m_2}{x_2}^2 +{m_3}{x_3}^2 + .............+{m_n}{x_n}^2\) = \(\sum m{x}^2\)
Moment of inertia about mutually perpendicular axis with x-axis and y-axis through O is:
\(I= {m_1}{r_1}^2 + {m_2}{r_2}^2 +{m_3}{r_3}^2 + ..........+{m_n}{r_n}^2\)
\(I= {m_1}{x_1+y_1}^2 + {m_2}{x_2 +y_2}^2 +{m_3}{x_3 +y_3}^2 + ...........+{m_n}{x_n +y_n}^2\)
\(I= {m_1}{x_1}^2 + {m_2}{x_2}^2 +{m_3}{x_3}^2 + ........+ {m_1}{y_1}^2 + {m_2}{y_2}^2 +{m_3}{y_3}^2 + .........\)
\(I= \sum {m}{x}^2 + \sum {m}{y}^2 \)
\(\therefore I= I_x + I_y\)
Torque:
Torque or moment of force is defined as the turning effect of force. It is also called moment of force. It is calculated by taking the product of the force and its perpendicular distance from the axis of rotation. It is denoted by τ. Its SI unit is Nm. Its dimensinoal formula is [\(M\) \({L}^2\) \({T}^{-2}\)]
\[\tau = r \times F\]
Torque is a vector quantity. So in terms of a vector, it is written as,
\[\overrightarrow \tau = \overrightarrow r \times \overrightarrow F \]
The direction of the torque is perpendicyular to the plane formed by the cross product of \(\overrightarrow r\) and \(\overrightarrow F\).
Relation between Torque and Moment of Inertia
fig
Consider a body of 'n' particles rotating about an axis YY'. Let τ be the torque applied which produces an angular acceleration α in all the particles. Let \(a_1\) , \(a_2\) , \(a_3\) ............\(a_n\) be the linear acceleration of particles at distances \(r_1\) , \(r_2\) ,\(r_3\) ................\(r_n\) from the axis of rotation
Now, the torque experienced by the particle having mass \(m_{1}\) is given by,
\[\tau_{1} = r_{1}\times F_{1} \]
\[\tau_{1} = r_{1} \times m_{1} \times a_{1}\]
\[\tau_{1} = r_{1} \times m_{1} \times \alpha \times r_{1}\]
\[\tau_{1} = \alpha (m_{1} \times r_{1}^2) \]
Similarly,
\[\tau_{2} = \alpha (m_{2} \times r_{2}^2) \]
Now, the total torque is given by,
\[\tau = \tau_{1} + \tau_{2} + ..........+\tau_{n}\]
or, \[\tau =\alpha (m_{1} r_{1}^2 + m_{2} r_{2}^2 + ...........+m_{n} r_{n}^2) \]
\[\therefore \tau = I\alpha\]
Angular momentum:
fig
The moment of linear momentum is called angular momentum of a body rotating. If 'm' be the mass of a rotating body about an axis with speed 'v' and radius 'r', its angular momentum is given by,
\[L=rp sin\theta \] or, \[\overrightarrow L=\overrightarrow r \times \overrightarrow p\]
If \(\theta = 90^\circ \)
\[L=rp\]
\[\therefore L=mvr\]
The direction of angular momentum is perpendicular to both \(\overrightarrow r and \overrightarrow p\)
Relation between Angular momentum and Moment of Inertia:
fig:- Relation between Angular momentum & moment of inertia.
Consider a body of 'n' particles rotating about an axis YY' with angular velocity \(\omega\) as shown in the figure above. Let \(v_{1}\), \(v_{2}\), \(v_{3}\).........,\(v_{n}\) be the linear velocities of particles which are at distances \(r_1\) , \(r_2\) ,\(r_3\) ................\(r_n\) from the axis of rotation. Now, the angular momentum of particle having mass \(m_{1}\) is given by,
\[L_{1} = m_{1} v_{1} r_{1} \]
\[or, L_{1} = m_{1} \omega r_{1} r_{1} \]
\[or, L_{1} = m_{1} r_{1}^2 \omega\]
Similarly,
\[or, L_{2} = m_{2} r_{2}^2 \omega\]
Now, the total angular momentum of the body is,
\[L =L_{1} + L_{2}+ L_{3}+......+L_{n}\]
\[or, L = m_{1} r_{1}^2 \omega+ m_{2} r_{2}^2 \omega+ m_{3} r_{3}^2 \omega + ........+m_{n} r_{n}^2 \omega\]
\[or, L = \omega (m_{1} r_{1}^2 + m_{2} r_{2}^2 + m_{3} r_{3}^2 + ........+m_{n} r_{n}^2 )\]
\[\therefore L=I\omega\]
Relation between Torque and angular momentum:
The angular momentum of a rigid body rotating about an axis with an angular velocity \(\omega\) is,
\[\therefore L=I\omega\]
Differentiating both sides of above equation with respect to time, we get
\[\frac{{dL}}{{dt}} = \frac{{d(I\omega )}}{{dt}}\]
Here moment of inertia I is constant,
\[\frac{{dL}}{{dt}} = I\frac{{d\omega }}{{dt}}\]
\[\frac{{dL}}{{dt}} = I\alpha ...........(i)\]
where, \(\alpha = \frac{{d\omega }}{{dt}}\), the angular acceleration of the body.
Torque acting on the body is \(\tau = I\alpha .............(ii)\)
From equation (i) and (ii),
\[\tau = \frac{{dL}}{{dt}}\]
Hence, the torque on body is equal to the rate of change of angular momentum of the rotating body about an axis.
Principle of conservation of angular momentum:
Principle of conservation of angular momentum states that 'In the absence of external torque on a system, the total angular momentum of the system remains constant'.
If I and \(\omega\) are the moment of inertia and angular velocity of a body rotating about an axis then,
\[I \omega \ = constant\]
We know that torque acting on a system of rotating body is rate of change of angular momentum of the system about an axis i.e,
\[\tau = \frac{{dL}}{{dt}}\]
If no external torque is acting on the system, \(\tau =0\), so
\[\frac{{dL}}{{dt}}=0\]
Integrating the above equation we get,
L = const.
or , I\(\omega\) = const.
In general, \(I_1 \omega_1 = I_2 \omega_2 \)
Kinetic Energy of rolling body:
fig
When a body rolls over a horizontal surface, there is rotational as well as linear motion (center of mass). So, it possess both rotational and transnational KE,
KE of rolling body = \(\frac{1}{2} I \omega^2 + \frac{1}{2}mv^2\)
or, KE=\(\frac {1}{2} mk^2 \frac{v^2}{r^2} + \frac{1} {2}mv^2\)
\(\therefore KE = \frac {1}{2} mv^2( \frac{k^2}{r^2} + 1)\)
Rolling body on a inclined surface:
fig
Consider a spherical body of mass m and radius r rolling down an inclined surface that makes an angle of \(\theta)\ with horizontal plane. u = 0 is the initial velocity of the body and V is the final velocity after travelling a distance s along the inclined plane. The vertical distance height covered the body during descending is h. During the motion of the body it loses its PE and changes into KE.
Potential energy lost by the body while falling the height h = mgh
Kinetic energy gained by the body during the fall = \(\therefore KE = \frac {1}{2} mv^2( \frac{k^2}{r^2} + 1)\)
According the conervation of mechanical energy:
Lost in PE = Gain in KE
Or, \[mgh = \frac{1}{2}m{v^2}\left( {\frac{{{k^2}}}{{{R^2}}} + 1} \right)\]
Or, \[{v^2} = \frac{{2gh}}{{\left( {\frac{{{k^2}}}{{{R^2}}} + 1} \right)}}................(i)\]
From figure,
\[\sin \theta = \frac{h}{s}\]
Or, \[h = s\sin \theta \]
Putting the value of h in equation ( i ),
\[{v^2} = \frac{{2gs\sin \theta }}{{\left( {\frac{{{k^2}}}{{{R^2}}} + 1} \right)}}\]
We know from Newton's law of motion for a body starting to move from rest with an acceleration a, u = 0, then
Or, \[{v^2} = 2as\]
Or, \[2as = \frac{{2gs\sin \theta }}{{\left( {\frac{{{k^2}}}{{{R^2}}} + 1} \right)}}\]
Or, \[a = \frac{{gs\sin \theta }}{{\left( {\frac{{{k^2}}}{{{R^2}}} + 1} \right)}}\]
Again,
KE of the body in terms of mass is,
Or, \[KE = \frac{1}{2}m{v^2} + \frac{1}{2}I{\omega ^2}\]
Or, \[KE = \frac{1}{2}{v^2}\left( {m + \frac{I}{{{r^2}}}} \right)\]
Since, Loss in PE = Gain in KE
Or, \[mgh = \frac{1}{2}{v^2}\left( {m + \frac{I}{{{r^2}}}} \right)\]
Or, \[mgh\sin \theta = \frac{1}{2}{v^2}\left( {m + \frac{I}{{{r^2}}}} \right)\]
Or, \[{v^2} = \frac{{2mgs\sin \theta }}{{m + \left( {\frac{I}{{{r^2}}}} \right)}}\]
As, \(v^2 = 2as)\,
\[2as = \frac{{2mgs\sin \theta }}{{m + \left( {\frac{I}{{{r^2}}}} \right)}}\]
Or, \[a = \frac{{mg\sin \theta }}{{m + \left( {\frac{I}{{{r^2}}}} \right)}}\]
This the expression for the acceleration of a rolling body on a inclined plane in terms of mass.







0 comments:
Post a Comment